AUTOSAR: Complete Guide to Automotive Software Architecture
Oct 29, 2025
-25 mins read
With the rapid evolution of automotive technology, software is at the heart of the most groundbreaking innovations, fundamentally redefining what vehicles can do. Complex electronic control units (ECUs), advanced driver assistance systems, and connected car technologies rely heavily on robust, scalable, and interoperable software architectures. However, managing this increasing software complexity poses significant challenges for manufacturers and suppliers alike.
This is where AUTOSAR (Automotive Open System Architecture) emerges as a transformative solution. More than just a technical standard, AUTOSAR is a comprehensive framework that lays down a unified foundation for automotive software development. It empowers software teams to build modular, reusable, and hardware-independent applications, dramatically improving efficiency and collaboration across the automotive supply chain.
As the industry accelerates towards software-defined vehicles and continuous innovation cycles, embracing AUTOSAR is vital for organizations committed to delivering reliable, cutting-edge automotive software. In this article, we explore the core concepts, architecture, and tangible benefits of AUTOSAR, offering insights to help automotive software professionals unlock new possibilities in this rapidly evolving field.
What is AUTOSAR: Understanding the Basics
At its core, AUTOSAR (AUTomotive Open System ARchitecture) is not a single product or tool but a standardized methodology and framework for designing automotive software systems. It was established in 2003 as a global development partnership among leading Original Equipment Manufacturers (OEMs), Tier-1 suppliers, semiconductor vendors, and software companies. Key founding members included BMW, Bosch, Daimler, Volkswagen, Continental, and technology providers such as Elektrobit and Vector.
The central idea behind AUTOSAR is the standardization of software architecture across the automotive industry. Before AUTOSAR, every OEM or supplier typically developed proprietary architectures for their electronic control units (ECUs). This siloed approach created significant inefficiencies:

- Limited software reuse: Software written for one ECU or vehicle platform often had to be rewritten for another.
- High integration complexity: OEMs had to integrate heterogeneous solutions from multiple suppliers, leading to compatibility issues and delays.
- Escalating development costs: Proprietary designs increased redundancy and made large-scale innovation difficult.
AUTOSAR was introduced to solve these problems by defining a common reference architecture and standard interfaces. This ensures that software components can be designed once and reused across multiple ECUs, hardware platforms, and vehicle generations. In other words, AUTOSAR acts as a universal language for automotive software.
Another fundamental principle of AUTOSAR is its modular, layered design. By abstracting hardware and separating application logic from infrastructure services, AUTOSAR makes it possible for OEMs and suppliers to focus on their core competencies. For example, an OEM can source a braking algorithm from one supplier, integrate communication software from another, and still ensure seamless interoperability thanks to AUTOSAR’s standardized runtime environment.
Today, AUTOSAR has evolved into a global standard with two complementary platforms – Classic and Adaptive – that address both traditional automotive domains (for example, powertrain or chassis) and emerging domains (such as autonomous driving and connected mobility). Its adoption has become nearly universal among global carmakers and Tier-1 suppliers, making it a prerequisite for modern automotive software development.
Why AUTOSAR Matters in the Automotive Industry
AUTOSAR serves as a strategic catalyst for the automotive sector’s evolution. As vehicles become increasingly software-driven, the need for a flexible, scalable, and reliable framework grows. AUTOSAR delivers on all these fronts, enabling the industry to meet current challenges and future demands effectively.
Scalability across vehicle platforms
Modern vehicles range from compact cars with limited electronic functions to high-end electric vehicles equipped with advanced driver assistance systems (ADAS) and a wide range of infotainment features. AUTOSAR allows software components to be scaled up or down across these platforms without significant re-engineering. For instance, a body control module developed for an entry-level sedan can be adapted for a luxury SUV with minimal changes.
Interoperability across suppliers
Automotive OEMs collaborate with multiple Tier-1 and Tier-2 suppliers for various subsystems, including engine control, braking, and infotainment. Without a common standard, integrating these subsystems would be a monumental task. AUTOSAR’s standardized interfaces act as a bridge, enabling plug-and-play collaboration among diverse suppliers. This reduces integration risks and accelerates time-to-market.
Enabler of advanced technologies
The automotive industry is rapidly moving toward autonomous driving, electrification, and connected mobility. AUTOSAR provides the foundation to support these trends. The Adaptive Platform, for example, promotes service-oriented architecture and high-performance computing, both of which are essential for features like lane-keeping assistance, over-the-air (OTA) updates, and V2X (vehicle-to-everything) communication.
Cost efficiency and time-to-market
Standardization reduces redundant work and shortens development cycles. Instead of reinventing the wheel for every project, companies can reuse validated components, saving both time and resources. This efficiency directly contributes to reduced costs and faster launches – critical factors in a competitive industry.
Compliance and safety
AUTOSAR is designed with ISO 26262 functional safety and emerging cybersecurity requirements in mind. With increasing regulatory pressure on vehicle safety and data protection, AUTOSAR helps OEMs and suppliers stay compliant while maintaining innovation.
Foundation for software-defined vehicles
Perhaps the most transformative aspect is how AUTOSAR sets the stage for Software-Defined Vehicles (SDVs). By separating software from hardware, it allows vehicle functions to be updated dynamically, even post-production. This flexibility enables continuous improvement and aligns with consumer expectations for vehicles that evolve like smartphones. More insights on this transformation can be found in our article on Software-Defined Vehicles.
Understanding AUTOSAR’s Core Architecture
AUTOSAR (Automotive Open System Architecture) is an industry-standard software architecture specifically designed to streamline automotive software development, enhance reusability, and dramatically reduce complexity.
One of AUTOSAR’s most powerful ideas is layering: separating concerns so teams can develop, test, and evolve different parts of the system independently. Its hierarchical structure divides the automotive software stack into four primary layers, each with distinct responsibilities and interfaces.
Below is a deep dive into each layer, how they interact, and what development teams need to know when building AUTOSAR-compliant systems.
Application Layer
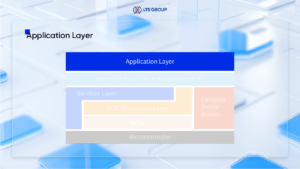
At the highest level, the Application Layer consists of modular Software Components (SWCs), each responsible for a specific vehicle function. Examples include control of air conditioning, braking systems, collision warning, or user infotainment interfaces. These SWCs communicate through clearly defined ports, allowing independent development and testing by different teams or suppliers. This modularity enables seamless reuse of software components across different vehicle models and hardware platforms.
Example: A software component managing air conditioning might gather data from temperature sensors and send commands to ventilation units. Another component could monitor exhaust emissions by analyzing NOx sensor data and adjusting the fuel-air mixture optimally, ensuring compliance with environmental standards.
Runtime Environment (RTE)

The RTE acts as middleware that orchestrates communication between Application Layer components and the underlying Basic Software Layer. It abstracts the hardware specifics so that software components can interact without being tied to particular ECU configurations.
Crucially, the RTE isolates the software application from the hardware platform. When deploying the application on different ECU platforms, only the RTE requires adaptation—allowing SWCs to remain unchanged. This separation significantly lowers development cost and time while providing flexibility to automotive software projects.
Think of the RTE as a coordinator that maps software components to system resources, ensuring smooth execution of function calls, resource allocation, and data handling in a consistent, transparent manner.
Basic Software (BSW)
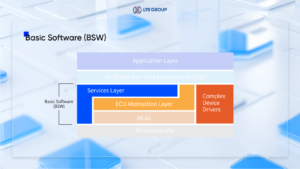
Sitting closest to the hardware, the BSW is fundamental software providing critical services necessary to operate the ECU. It is subdivided into various modules, each delivering specialized functions:
- Communication services: Manage in-vehicle networking via CAN, LIN, FlexRay, and Ethernet.
- Diagnostic services: Handle fault detection and diagnostic trouble codes (DTCs).
- Memory and time management: Oversee task scheduling and optimize memory usage.
- Security services: Implement mechanisms for data security and access control.
One critical subset is the ECU Abstraction Layer (EAL), which standardizes access to hardware resources like timers and serial interfaces through uniform APIs, hiding the complexities of underlying hardware. This abstraction enables developers to reuse source code across diverse ECUs without modification.
The closest layer to physical hardware is the Microcontroller Abstraction Layer (MCAL), translating requests from above into hardware-specific control signals. For example, MCAL might activate a GPIO pin to switch a light on when requested by a higher-level service.
Microcontroller Unit (MCU)
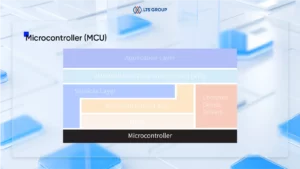
In the AUTOSAR architecture, the Microcontroller Unit (MCU) sits at the very bottom of the system, forming the software layer that interacts directly with the hardware. This layer connects to other software modules via the Microcontroller Abstraction Layer (MCAL) and performs the following functions:
- Reset basic system settings such as power, clock, memory, etc.
- Controlling the MCU’s operating mode transitions, such as RUN, SLEEP, and RESET.
- Provides hardware reset and root cause tracking capabilities
- Abstraction so that upper-level software can control the MCU without knowing the hardware details.
The MCU layer plays a critical role in determining system reliability and performance, and is an essential component for stable interoperability with other layers of AUTOSAR.
Comparing AUTOSAR’s Core Architectures: Classic and Adaptive
| Criterion | Classic AUTOSAR | Adaptive AUTOSAR |
| Primary use case | Traditional vehicle control functions | Complex application processing and high-performance computing |
| Target hardware | Resource-constrained microcontrollers (MCU) | High-performance multi-core SoCs, complex OS environments |
| Software architecture | Modular, statically configured structure | Service-oriented architecture (SOA) with dynamic configuration and updates |
| Main programming language | C | C++ |
| Operating system | Real-Time Operating System (RTOS) or bare-metal | POSIX-compliant OS (e.g., Linux, QNX) |
| OTA (Over-The-Air) update support | Not supported | Supported, real-time network-based updates |
| Real-time capability | Hard real-time (deterministic, microsecond level) | Soft real-time (milliseconds level) |
| Software deployment | Static, monolithic codebase loaded from ROM | Dynamic, applications loaded into RAM and executed |
| Task scheduling | Static scheduling | Dynamic scheduling |
| Computing power | Lower (~1000 DMIPs) | Higher (>20,000 DMIPs) |
| Safety level compliance | Up to ASIL D (highest automotive safety standard) | Minimum ASIL B compliance |
| Functionality | Fixed, control-oriented | Flexible, adaptive, supporting incremental changes |
Classic AUTOSAR: The optimal solution for real-time control systems
Classic AUTOSAR was created to support time-critical automotive functions on embedded ECUs with limited resources. Its strength lies in deterministic real-time performance, making it indispensable for safety-critical vehicle domains.
Key characteristics
- Target hardware: Runs on resource-constrained MCUs with limited memory and CPU capacity.
Architecture: Modular, with static configuration defined at the development stage. Software rarely changes during the vehicle lifecycle. - Operating system: Uses RTOS or bare-metal environments for microsecond-level determinism.
- Programming language: Primarily C, lightweight and reliable for embedded systems.
- Updates: No support for OTA; updates are handled manually during maintenance.
- Safety: Compliant with ISO 26262 up to ASIL D, the highest safety level.
When to use classic AUTOSAR
- For embedded ECUs requiring hard real-time performance.
- When stability on limited hardware resources is critical.
- In systems with minimal post-production updates.
- Where strict safety certification is mandatory.
- For leveraging standardized, reusable ECU modules.
Representative application examples
- Fuel pump control
- Drive system control
- Emergency Braking System (EBS)
- Tire Pressure Monitoring System (TPMS)
Adaptive AUTOSAR: A flexible infrastructure for next-generation smart cars
Adaptive AUTOSAR was introduced to meet the needs of connected, autonomous, and software-defined vehicles. It is designed for high-performance computing and flexible software architectures.
Key characteristics
- Target hardware: Runs on multi-core SoCs with large memory and strong processing capabilities.
Architecture: Based on Service-Oriented Architecture (SOA), supporting dynamic communication and updates. - Operating system: Uses POSIX-compliant OS (e.g., Linux, QNX) with multitasking and multithreading support.
- Programming language: Primarily C++, enabling parallel processing and modern application development.
- Updates: Fully supports OTA updates, even during vehicle operation.
Scalability: Facilitates integration with cloud services and backend systems for seamless digital connectivity.
When to use adaptive AUTOSAR
- For autonomous driving, ADAS, infotainment, and connected car features.
- When dynamic updates and continuous reconfiguration are needed.
- In environments requiring multi-core processing and HPC platforms.
- Where SOA-based flexible software and cloud integration are priorities.
- For soft real-time systems (milliseconds-level response acceptable).
Representative application examples
- Lane and obstacle detection using cameras
- AI-based parking assistance
- Real-time navigation with cloud integration
- Voice assistants powered by AI
- Continuous sensor fusion for autonomous driving
Key takeaway
- Classic AUTOSAR is best for deterministic, safety-critical, control-oriented functions.
- Adaptive AUTOSAR is best for flexible, scalable, high-performance computing applications.
Most modern OEMs and Tier-1 suppliers adopt a hybrid approach – combining both classic and adaptive AUTOSAR to ensure vehicles meet both real-time safety requirements and next-gen mobility demands.
LTS Group’s AUTOSAR Compliance Strategy
A team of experienced, advanced automotive software engineers
LTS Group proudly boasts a team of automotive software engineers with advanced expertise and extensive field experience. We excel in both development and testing services, combining solid technical knowledge and flexible problem-solving skills with direct collaboration experience with leading automotive companies in Korea, Japan, and Europe.
Our engineers are not only proficient in C/C++, Python, and embedded languages, but also have a deep understanding of AUTOSAR (Classic and Adaptive) software architectures, adhere to ISO 26262 (Automotive Software Safety Standard) development procedures, and work in accordance with ASPICE (Automotive Software Process Audit Standard).
Additionally, we are proficient in utilizing the following specialized development tools widely used in the automotive industry :
- Vector DaVinci Developer & Configurator: Design and configure BSW and RTE according to AUTOSAR standards.
- ETAS INCA: ECU data acquisition and precise calibration in real-world environments
- dSPACE: HIL Simulation and Control System Testing
- MATLAB/Simulink: System-Level Embedded Software Modeling and Development
LTS Group engineers are fluent in English and Korean, and they utilize project management tools such as Jira, Confluence, and Redmine to achieve high efficiency in remote collaboration with global partners.
AUTOSAR architecture and standards implementation process at LTS Group
LTS Group develops automotive software based on the AUTOSAR (Classic and Adaptive) architecture, following a clear and systematic development process. This effectively ensures system quality, scalability, and compatibility.
The entire process is designed to seamlessly integrate various advanced technology requirements, including Cybersecurity, Functional Safety, Over-the-Air Software Updates (OTA), Flash Bootloader (FBL), and Diagnostics, within a single system.

Step 1: Design and develop the application layer
- We design Software Components (SWCs) corresponding to core functions such as brake control, lighting systems, sensors, and gateways.
- Develop modeling and application-layer control logic using tools such as Vector DaVinci Developer and MATLAB/Simulink.
- Define interfaces between SWCs and configure R-Ports and P-Ports.
Step 2: Developing the driver layer (complex device drivers)
- We develop custom drivers for high-performance hardware such as high-speed sensors, radars, and cameras.
- Adds real-time control capabilities and high-efficiency drivers for hardware not supported by the basic AUTOSAR BSW.
Step 3: Setting up the runtime environment (RTE) layer
- Automatically generate RTE code and configure connections between SWCs and BSW via Vector DaVinci Configurator.
- RTE allows SWCs to be managed as independent blocks, increasing reusability and maintainability.
- It also supports scenarios such as diagnostics, network communication, and FBL triggers.
Step 4: Setting up the BSW and MCU layers
- Integrates various BSW modules such as OS, communication stack (CAN, LIN, Ethernet), memory, diagnostic services, EcuM, NvM, etc.
- The MCAL layer is configured to map each signal to the hardware of the MCU.
- Flash, simulate, and configure your system using ETAS INCA, dSPACE, CANoe, DaVinci Configurator, and more.
Step 5: Integrate advanced technology features
- Security (Cybersecurity): Applies the ISO/SAE 21434 standard and implements authentication, encryption, key management, Secure Boot, and Secure Diagnostics functions.
- Functional Safety (ISO 26262): Implement HARA analysis, ASIL determination, system anomaly detection, and response mechanisms.
- OTA (Over-the-Air): Design a mechanism to safely update ECU software remotely.
- FBL (Flash Bootloader): Develops a bootloader for ECU software upgrades, performs memory partitioning, and performs integrity verification.
- NFC Integration: Implement NFC features such as user authentication, keyless systems, and settings configuration.
- Network communication: Set up CAN, LIN, FlexRay, Ethernet buses, and synchronize with relevant modules.
- UDS Diagnostics (ISO 14229): Set up DCM, DEM, DoIP, and develop ECU diagnostic services (e.g., DTC retrieval, deletion, routine control, reprogramming, etc.).
Step 6: System testing and validation
- We perform various stages of testing, including Unit Test, Integration Test, and System Test.
- Building a test environment using HIL/SIL simulation (tools: dSPACE, CANoe, Jenkins, Robot Framework).
- Automate testing processes and reports according to ISTQB standards.
- The entire development process adheres faithfully to the following international standards:
- ISO 26262 – Functional Safety
- ASPICE – Quality Process
- ISO/SAE 21434 – Automotive Security
Real-World Examples of LTS Group’s AUTOSAR Expertise
Case study 1: Developing a driving safety and energy management system for a Chinese customer
The Chinese client, a company specializing in automotive safety and energy management systems, was looking for a partner in Vietnam that could support software development under a Build-Operate-Transfer (BOT) model.
Key contents
- Development of BSW and MCAL for various systems such as airbags, brakes, radar, and steering locks.
- Design and Testing of a Horn Control System Using MATLAB/SIL Models
- Secure Boot Loader integration and deployment to Zone ECUs
- Compliant with AUTOSAR Classic, ISO 26262 Part 4-6, and ASPICE Level 2 standards
Achievement: Build a highly secure, reusable, and cost-effective software system, laying the foundation for long-term operation in Vietnam.
Case study 2: Building an ADAS LiDAR test environment for a European customer.
A European ADAS solutions company needed an advanced test environment to verify the accuracy of LiDAR sensor-based object recognition and tracking capabilities. LTS Group completed a project to build an AUTOSAR Adaptive-based test system to meet this requirement.
Key highlights
- Design of an automated test environment that supports real-time data processing of LiDAR systems.
- Implementation of a flexible test structure based on SOA (Service-Oriented Architecture)
- Support for testing over-the-air (OTA) updates and runtime change scenarios
- Applying multi-platform test tools suitable for POSIX-based operating systems (e.g., Linux)
Results: The testing period was significantly reduced from weeks to just days, enabling precise verification of the system’s accuracy and stability. This provides the customer with a reliable foundation for the commercialization of their LiDAR solution.
Frequently Asked Questions (FAQ)
What is AUTOSAR?
AUTOSAR is a global development partnership that defines a standardized architecture for automotive software. While not a legally mandated standard, AUTOSAR is considered a de facto framework for the automotive industry, which must meet functional safety standards like ISO 26262 and quality processes like ASPICE. Many automakers and component suppliers are actively adopting AUTOSAR to ensure development efficiency, modularity, and compatibility in the increasingly complex automotive software environment.
When should I choose Classic, and when should I choose Adaptive?
The choice between Classic AUTOSAR and Adaptive AUTOSAR depends on the system’s purpose, hardware environment, real-time processing requirements, and the need for over-the-air (OTA) updates. For example, Classic AUTOSAR is suitable for safety-critical functions that require hard real-time performance, such as braking control and engine control. Conversely, Adaptive AUTOSAR is better suited for applications that require high-performance computing and flexible updates, such as autonomous driving, infotainment, and V2X communications.
What is the most important thing to consider when starting an AUTOSAR project?
When starting an AUTOSAR project, the most important thing is to clearly analyze the requirements and establish an appropriate architecture design strategy. An inaccurate initial design can significantly increase costs during subsequent development and testing stages. LTS Group works with customers to develop strategies from the early stages of a project and provides comprehensive support for successful project execution.
Conclusion
In the era of digital transformation in the automotive industry, software is no longer a secondary element but the heart of the vehicle. AUTOSAR is positioned as a core platform for realizing the smart, safe, and scalable vehicles of the future.
LTS Group, with our practical expertise, extensive project experience, and flexible approach, supports the entire AUTOSAR journey, from strategy development to development, testing, and deployment. If your company is looking for a consulting, development, and validation partner for AUTOSAR (Classic or Adaptive) solutions, start with LTS Group today.

Share


LTS Group
LTS Group is an IT outsourcing services provider who will go the extra mile to help businesses worldwide break barriers to achieve growth. With a vast pool of talented developers and testers owning experience in a range of domains, we aim to enhance your competitiveness with superior IT outsourcing projects.

More must-reads to keep leaders updated

LTS Group Won Vietnam’s Top 10 ICT Companies Awards for 3 Consecutive Years 2023, 2024 & 2025
Apr 1, 2026
-4 mins read
It is with great pride and deep gratitude that we announce that LTS Group has once again been recognized as one of Vietnam’s Top 10 ICT Companies at the prestigious annual program run by the Vietnam Software & IT Services Association (VINASA). This honor marks our third year in a row, after wins in 2023 and 2024, reaffirming our steadfast commitment to quality, innovation, and global digital services. Table of Contents Toggle About the Award Celebrating Vietnam’s Leading Tech InnovatorsA Three-year Streak That Reflects Our Core ValuesEmbarking on the Next Chapter of Innovation About the Award Celebrating Vietnam’s Leading Tech Innovators The VINASA Top 10 ICT Companies program has long been one of the most prestigious awards in Vietnam’s technology industry, spotlighting enterprises that drive digital transformation and deliver impactful tech solutions. The ceremony held on October 9 in Hanoi honored a total of 169 enterprises that had been verified and reviewed across 23 technology sub-sectors and 5 main categories of digital service. Uniquely this year, the event also debuted the “Vietnam Digital Technology Enterprise Map 2025”, a comprehensive mapping of 257 enterprises occupying 389 positions across the digital-tech ecosystem in Vietnam. The program stands as one of the country’s most prestigious recognitions in the tech sector, spotlighting companies that deliver transformational digital solutions, command scale and revenue, and help shape Vietnam’s drive toward an innovation-led economy. A Three-year Streak That Reflects Our Core Values Starting as LQA, Vietnam’s first independent quality assurance firm, LTS Group has grown into a comprehensive provider of end-to-end technology solutions, offering software development, software testing, data annotation, LLM data training, and HR solutions. With a strong presence in Japan, the USA, and South Korea and a client network spanning more than 11 countries, we take pride in delivering tailored solutions that help businesses worldwide achieve sustainable growth. Our 97% client satisfaction rate stands as proof of the trust and long-term partnerships we’ve built with global enterprises. Being recognized for the third consecutive year in the Vietnam Top 10 ICT Companies Awards is more than an honor; it’s a reflection of our people’s dedication and commitment to setting new benchmarks for global IT services excellence. Embarking on the Next Chapter of Innovation This recognition reminds us how far we’ve come and how much potential still lies ahead. As we grow, LTS Group will continue to do what we do best: deliver reliable technology solutions, strengthen our presence across key markets, and expand partnerships with clients who trust us to bring their ideas to life. We would like to thank our clients, partners, and colleagues for being part of this journey. Your trust keeps us moving forward, one project and one breakthrough at a time.

LTS Group CEO to Deliver Keynote at Vietnam – EU Cooperation Workshop 2026
Mar 4, 2026
-4 mins read
LTS Group is pleased to share that Mrs. Xuan Phung, CEO of LTS Group, will deliver a keynote address at the Vietnam – EU Science, Technology & Trade Workshop 2026, taking place on March 7, 2026 at The Hotel Brussels, Belgium. The workshop is organized by the Vietnamese Intellectual Association in Belgium and Luxembourg (ViLaB) and the Vietnamese Business Association in Belgium (VBAB), under the patronage of the Embassy of Vietnam in Belgium and Luxembourg. It brings together policymakers, researchers, and business leaders from Vietnam and across Europe to strengthen cooperation in science, technology, and trade. Table of Contents Toggle Event OverviewSpeaker IntroductionKeynote Session Event Overview Theme: Promoting Vietnam – EU Cooperation in Science, Technology and Trade Centered on strengthening Vietnam–EU cooperation, the workshop covers a range of strategic topics, including: Artificial Intelligence and Digital Transformation Biotechnology Nuclear Energy and Nuclear Medicine Trade and Business Collaboration More than a technical forum, the event aims to connect Vietnamese experts worldwide and foster practical partnerships between Vietnam and the European Union. With the shared vision of Connect – Innovate – Create, the workshop encourages cross-border collaboration to support sustainable growth and long-term innovation. Speaker Introduction Mrs. Xuan Phung is the Founder and Chairwoman of Lotus Quality Assurance (LQA), the first independent software testing firm established in Vietnam, which now has grown into an end-to-end IT services provider LTS Group. She founded the company in 2016 with a clear vision to build dedicated software quality engineering capabilities and elevate the role of quality in the global digital ecosystem. Starting from a small founding team, she has grown LTS Group into an organization of more than 500 professionals, with offices in Vietnam, Japan, South Korea, and the United States. Under her leadership, LTS Group has evolved from a specialized testing company into an international technology services provider, supporting clients across major global markets. Software quality engineering has remained at the core of the company’s identity, reflecting her long-standing commitment to building reliable, scalable, and trustworthy digital systems. As the Chairwoman, she continues to guide the company’s long-term vision, advocating for the strategic importance of quality. Keynote Session Mrs. Xuan Phung will co-present with Dr. Mai Xuan Phu, Quality Assurance Manager at Jemmic (Luxembourg) on the topic: “A National Institute for QA in Software and AI: A Strategic Pillar for Ensuring Robust Development and Global Market Access.” In this keynote, Mrs. Xuan will share perspectives drawn from industry practice on how Vietnam can strengthen its software quality ecosystem as it expands in global markets. The session will cover: Vietnam’s ICT growth and the shift toward quality-driven competitiveness Existing coordination gaps within the QA landscape The proposed role of a National QA Institute in aligning standards and capabilities How enterprises can contribute to a more unified and internationally recognized quality framework Through this contribution, LTS Group continues to advocate for elevating software quality engineering as a strategic driver of sustainable digital development. We look forward to engaging with partners, experts, and industry leaders at the workshop and contributing to meaningful dialogue on advancing Vietnam–EU collaboration in technology and innovation. Date: Sunday, March 7, 2026 Time: 10:00 AM – 12:00 PM Location: The Hotel Brussels, Boulevard de Waterloo 38, 1000 Brussels, Belgium

TÜV Rheinland and LTS Group Sign Strategic Partnership to Deliver Cybersecurity and Functional Safety Testing Services
Mar 3, 2026
-4 mins read
On March 2, TÜV Rheinland, a global leader in testing, inspection, and certification, officially signed a Memorandum of Understanding (MOU) with LTS Group to collaborate in delivering cybersecurity and functional safety testing services. During the signing ceremony, both parties discussed key areas of cooperation, including testing talent development and the operational collaboration model. Through this strategic partnership, LTS Group and TÜV Rheinland aim to combine global certification expertise with strong technical testing capabilities to provide high-quality software testing services that meet international standards. Founded in 1872, TÜV Rheinland is a leading global provider of testing, inspection, and certification services. The organization operates a worldwide network of accredited laboratories, training centers, and inspection bodies, supported by approximately 27,000 employees across offices in more than 50 countries. TÜV Rheinland tests and certifies technical equipment, products, and services while also supervising projects, processes, and information security for enterprises across industries. Its experienced experts provide professional training and workforce development programs for a wide range of sectors. Since 2006, TÜV Rheinland has been a member of the United Nations Global Compact, demonstrating its commitment to sustainability and ethical business practices. The company’s services are centered around four core areas: industrial services and cybersecurity, mobility, product quality and safety, and people and business assurance. Founded in 2016, LTS Group is a global full-cycle IT services and high-quality IT staffing provider. The company operates five member companies and maintains international branches in the United States, South Korea, and Japan. Its subsidiary, Lotus Quality Assurance (LQA), is recognized as Vietnam’s first independent software testing company, delivering reliable testing services backed by experienced professionals. Over nearly a decade, LTS Group has served more than 60 clients across 11 countries, successfully completed 275 projects, and achieved a 97% customer satisfaction rate. This MOU marks an important milestone in LTS Group’s continued commitment to enhancing service quality and expanding its global partnership ecosystem. Mr. Jin Pyo Noh, representative of TUV Rheinland, shared, “At TÜV Rheinland, we emphasize precision in both assessment and implementation. Through our collaboration with LTS Group, we combine that precision with strong local engineering capabilities to support customers in addressing safety and cybersecurity challenges in a structured and sustainable way. In today’s increasingly complex automotive systems, achieving Functional Safety and Cybersecurity requires integrating safety and security into system design from the outset. Beyond technical alignment, we believe successful partnerships are built on shared values and mutual trust. That is what makes this collaboration in Vietnam particularly meaningful for us as we strengthen safety capabilities across the Asia Pacific region.” Mrs. Xuan Phung, CEO of LTS Group, stated, “We are proud to partner with TÜV Rheinland APAC to further strengthen our commitment to quality in the automotive sector. By combining TÜV Rheinland’s training and certification expertise with LTS Group’s experience in automotive software development and validation, we aim to deliver a comprehensive solution covering process consulting, engineer training, technical assessment, and certification. It is also a wonderful opportunity for Vietnamese automotive talents to dive deep into world-class standards for Functional Safety and Cybersecurity.”

Email:contact@ltsgroup.tech
Phone:(+84) 96-238-7474
Headquarters:17th Fl, MD Complex Office Building, 68 Nguyen Co Thach Street, Hanoi, Vietnam
Japan office:5F, Iwamoto Building, 3-20-10 Shibaura, Minato-ku, Tokyo 108-0023, Japan
US office:25787 Rawley Springs Dr, Chantilly, VA 20152
Korea Office:Seoul, Seocho-gu, Gangnam-daero 327, 12Fl, Room 1214




