자동차 라이다 테스트에 관한 포괄적인 분석 – LTS Group 실제 사례 연구
Sep 4, 2025
-36 mins read

자동차 산업이 자율주행으로 빠르게 나아가면서 첨단 운전자 지원 시스템(ADAS) 및 자율주행차가 안전하고 효율적으로 작동하도록 보장하는 데 자동차 라이다 테스트는 핵심적인 요소가 되었습니다.
본 글은 “자동차 라이다 테스트에 관한 포괄적인 분석이라는 제목으로, 빛 감지 기술인 LiDAR가 실제로 어떻게 테스트되고 적용되는지에 대한 심층 분석을 목표로 하며 특히 LTS Group의 프로젝트 사례를 중심으로 다룹니다.
우선, 기본적으로 자동차 LiDAR가 무엇인지 살펴보고 이어서 LiDAR의 주요 이점들을 조명할 것입니다. 이는 정확한 감지 및 매핑 능력, 교통 안전 증진, 그리고 자율주행차를 위한 핵심 기반으로서의 역할 등을 포함합니다.
자동차 LiDAR는 무엇인가요?
LiDAR(Light Detection and Ranging)는 레이저 빔을 방출하고 물체에 부딪혀 반사되어 돌아오는 시간을 측정하여 거리를 계산하는 능동 센서입니다. 이를 통해 차량 주변 객체의 형태와 위치를 묘사하는 3D “포인트 클라우드”를 생성합니다.
조도에 의존하는 카메라나 형상 해상도에 제한이 있는 레이더와 비교하며 LiDAR는 실시간으로 매우 정확한 깊이 데이터를 생성하며 이는 자율주행 차량의 공간 인식에 매우 적합합니다. 이 기술은 지형 측정 등 다양한 분야에서 오랫동안 사용되어 왔으며 현재는 최신 차량의 핵심 구성 요소가 되었습니다.
자세한 개념을 알아보기 위해 라이다 센서 (Lidar Sensor)란 무엇입니까? 2025년 포괄적인 가이드에 관한 글을 추가 참고하세요!
자동차 LiDAR의 이점
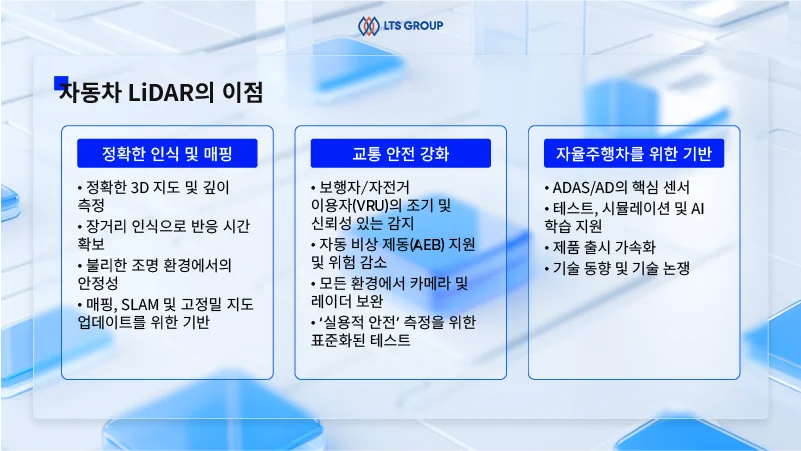
LiDAR는 현대 자동차에 세 가지 주요 이점을 제공합니다. 첫째, 정확한 인식 및 매핑, 둘째, 교통 안전 강화, 셋째, 첨단 운전자 지원 시스템(ADAS) 및 자율주행의 기반 제공입니다. 각 이점은 개별 센서 테스트부터 전체 시스템 검증에 이르는 ‘자동차 LiDAR 테스트’ 절차와 밀접하게 연관되어 있습니다.
정확한 인식 및 매핑
정확한 3D 지도 및 깊이 측정
LiDAR는 직접적으로 거리를 측정하여 고밀도의 3D “포인트 클라우드”를 생성하며, 이는 차량이 모든 객체의 형태, 크기 및 상대 위치를 이해하는 데 도움을 줍니다. 이는 특히 조명 조건이 복잡하여 카메라가 어려움을 겪거나 레이더가 객체의 정확한 윤곽을 제공하기 어려운 상세한 도심 환경에서 유용합니다. 정확한 깊이 정보를 통해 알고리즘은 연석의 가장자리, 차량의 형상 또는 3D 바운딩 박스(Bounding Box)를 추출할 수 있습니다.
장거리 인식으로 반응 시간 확보
특히 1550nm 대역의 장거리 LiDAR 구성은 수백 미터 거리의 물체까지 감지할 수 있어, 시스템이 예측하고 반응할 수 있는 귀중한 수 밀리초의 시간을 확보하게 합니다. 3D 지도와 지속적인 추적(Tracking)을 결합하면 소프트웨어는 미래 궤적을 더 높은 신뢰도로 예측할 수 있습니다. 이는 고속도로 주행 시 핵심적인 이점입니다.
불리한 조명 환경에서의 안정성
LiDAR는 능동 센서이므로 주변 조명에 덜 의존적입니다. 따라서 카메라 성능이 현저히 저하되는 야간이나 터널에서도 일관된 성능을 유지합니다. 이는 주야간 공간 인식 품질의 편차를 줄여 학습/시뮬레이션 데이터의 일관성을 높입니다. 물론, 모든 시스템은 다양한 기상 조건에서 철저히 테스트되어야 합니다.
매핑, SLAM 및 고정밀 지도 업데이트를 위한 기반
정확한 깊이 데이터의 강점은 SLAM(Simultaneous Localization and Mapping) 알고리즘이 상대 위치 파악에 자신감을 갖게 하며, 차선, 도로변 및 3D 구조물 수준의 상세한 지도 업데이트를 지원합니다. ‘자동차 LiDAR 테스트’ 절차를 통해 개발팀은 포인트 클라우드의 품질(밀도, 노이즈, 정확도)을 측정하고 센서를 보정하여(Extrinsics), 시스템 수준에서 다중 센서 정합성을 보장할 수 있습니다. 이는 시뮬레이션에서 실제 환경으로의 개발 주기를 단축시킵니다.
교통 안전 강화
보행자/자전거 이용자(VRU)의 조기 및 신뢰성 있는 감지
고해상도 LiDAR는 복잡한 환경에서 보행자, 자전거, 오토바이와 같은 작은 형태를 분리하여 효과적인 충돌 경고 및 자동 비상 제동(AEB) 기능의 기반을 마련합니다. 독립적인 테스트 표준인 유로 NCAP(Euro NCAP)는 VRU(차량-보행자/자전거/오토바이)에 대한 특정 시나리오를 가지며, 시스템 성능을 평가하기 위한 시각, 레이더, LiDAR 특성을 시뮬레이션하는 목표 세트를 사용합니다. 이는 표준에 따른 능동 안전 검증에서 LiDAR의 역할을 보여줍니다.
자동 비상 제동(AEB) 지원 및 위험 감소
포인트 클라우드가 교차 위험을 확인하면 정확한 거리/깊이 정보 덕분에 시스템은 AEB를 더 일찍 활성화할 수 있습니다. 도시 속도에서 장거리 감지를 통해 확보되는 수백 분의 1초는 “거의 충돌”과 “충돌 없음” 사이의 차이가 될 수 있습니다. ‘자동차 LiDAR 테스트’는 NCAP 시나리오를 충족시키기 위한 감지 시간, 파이프라인 지연 및 활성화 신뢰성을 평가합니다.
모든 환경에서 카메라 및 레이더 보완
카메라는 의미론적 정보(색상, 기호)를 제공하고, 레이더는 상대 속도를 매우 잘 측정하며, LiDAR는 정확한 깊이를 담당합니다. 이 세 가지 센서는 서로를 보완합니다. 센서 퓨전(Sensor Fusion) 시, 시스템은 장면을 “이해”하면서 동시에 공간/속도를 “정확하게 측정”하여 혹독한 조건에서도 오류 허용 오차를 증가시킵니다. 이러한 이유로 많은 현대 인식 아키텍처는 더 높은 시스템 안전성을 달성하기 위해 다중 센서 통합 방향으로 설계됩니다.
‘실용적 안전’ 측정을 위한 표준화된 테스트
LiDAR가 야간/저조도에서 강력하더라도, 개발팀은 다양한 조건(빗방울/먼지 노이즈, 낮은 반사율 표면, 가림)과 다양한 시나리오(교차, 좌회전/우회전, 후진)에서 테스트해야 합니다. 유로 NCAP의 프로토콜은 테스트 도로 조건, 조명, VRU 목표물 및 측정 기준을 상세히 규정하여 반복 가능하고 객관적인 결과를 보장합니다. 이를 통해 제조사는 프로그램 수준에서 안전 이점을 입증하기 위한 참조 프레임을 확보합니다.
자율주행차를 위한 기반
ADAS/AD의 핵심 센서
실시간 3D 데이터를 제공하는 LiDAR는 레벨 2+부터 레벨 4 수준의 자율주행 기능 세트의 ‘근간’이 되는 센서입니다. 이러한 시스템에서는 상대적 위치 정확도와 객체 형태(Object Shape)가 제어 품질을 결정하는 중요한 요소가 됩니다.
인식(Perception) 아키텍처에서 LiDAR는 시야를 극대화하고 시야 가림을 최소화하기 위해 일반적으로 루프(Roof)나 라디에이터 그릴과 같은 높은 위치에 우선적으로 배치됩니다. ‘자동차 라이다 테스트를 통해 검증된 LiDAR 데이터는 제어기가 더욱 원활하고 안전하게 의사결정을 내릴 수 있도록 돕습니다.
테스트, 시뮬레이션 및 AI 학습 지원
LiDAR의 포인트 클라우드 데이터는 시뮬레이션 시나리오 생성, AI 학습을 위한 라벨링, 그리고 HIL(Hardware-in-the-Loop)/SIL(Software-in-the-Loop) 테스트를 위한 ‘물리적 본질을 정확히 반영하는’ 데이터 소스가 됩니다.
최신 테스트 플랫폼들은 LiDAR, 레이더, 카메라 데이터 흐름을 통합하여 엔지니어들이 희귀한 시나리오를 합리적인 비용으로 구축할 수 있도록 지원합니다. 덕분에 개발 주기를 단축시키고 실제 도로 주행 전에 더 많은 상황을 포괄할 수 있습니다.
제품 출시 가속화
벤치 테스트부터 HIL 소프트웨어 테스트, 그리고 NCAP 도로 테스트에 이르는 테스트 절차가 자동화되면 기업은 안전 요구 사항 검증 시간을 단축할 수 있습니다. 주야간에 일관된 LiDAR 데이터는 모델 학습의 분산을 줄이고 일반화 능력을 향상시킵니다. 결과적으로 안전 수준을 유지하면서도 ‘개념 구상부터 제품 출시까지’의 시간이 단축됩니다.
기술 동향 및 기술 논쟁
FMCW(Frequency Modulated Continuous Wave) 방식은 직접적인 속도 측정(Direct Velocity Measurement)을 가능하게 할 것으로 기대되지만, 기술 성숙도, 비용, 대량 생산 로드맵에 대한 업계의 논쟁은 여전히 진행 중입니다.
따라서 많은 기업들이 FMCW를 추구하면서도 ToF(Time-of-Flight) 및 솔리드 스테이트(Solid-State) LiDAR 최적화 노력을 병행하고 있습니다. 공통적인 의견은 센서 퓨전(Sensor Fusion)이 여전히 높은 안전성을 달성하기 위한 ‘관문’이며, LiDAR는 인식 시스템을 위한 고정밀 ‘3D 골격’을 제공하는 역할을 한다는 것입니다. 따라서 ‘자동차 LiDAR 테스트’는 단일 센서만을 테스트하는 것을 넘어 시스템 수준에서의 퓨전 파이프라인 전체를 검증하는 작업입니다.
라이다 테스트의 비즈니스 과제

높은 비용 및 테스트 복잡성
먼저, 라이다 테스트는 기후 부스(Weather Chamber), 야간 테스트 트랙, VRU(취약 도로 이용자) 목표물, 정렬 장비, 레이저 안전 장비 등을 필요로 하며, 이 모든 것은 상당한 비용이 소요됩니다. 신뢰할 수 있는 통계적 검증을 위해 시나리오(비, 안개, 먼지)를 확장할 경우, 테스트 비용과 시간이 빠르게 증가합니다.
이와 더불어 대용량의 포인트 클라우드 데이터는 저장, 라벨링(Labeling) 및 KPI(거리, 정밀도, 각도 해상도, FPR/FNR) 분석에 비용을 수반합니다. 따라서 기업은 전체 시스템을 평가하기 위해 벤치 테스트(Bench Test), HIL(Hardware-in-the-Loop)/SIL(Software-in-the-Loop) 테스트 및 실제 도로 주행에 동시에 투자해야 합니다.
결과적으로 ‘시나리오 매트릭스’를 최적화하지 않으면 시장 출시 일정이 지연되고 ROI(투자 수익률)가 감소할 수 있습니다. 따라서 파이프라인 자동화, 고위험 시나리오 우선순위 지정, 시뮬레이션 재활용을 통한 비용 절감이 필요합니다.
표준화 및 글로벌 규제 미비
현재 자동차 LiDAR에 대한 독자적인 성능 표준은 여전히 수립 중이며, SAE, ISO와 같은 많은 기관들이 아직 초안 단계에 머물러 있습니다. 지역 간 비동기화로 인해 결과 비교, 인증 및 공표에 어려움이 있습니다.
시스템 레벨에서는 ISO 26262 및 SOTIF가 안전 프레임워크를 제공하지만, 특정 센서 KPI를 명시하지는 않습니다. 이로 인해 각 기업은 자체적인 프로세스와 지표를 맞춤 설정해야 하며, 이는 측정 방식과 합격/불합격 기준의 차이로 이어집니다.
유로 NCAP(Euro NCAP)는 AEB/VRU 프로토콜과 다중 센서 시뮬레이션 목표를 통해 실제 환경 평가를 지원합니다. 하지만 벤치 테스트부터 도로 테스트까지 일관된 연결을 위해서는 전 세계적으로 통일된 LiDAR 표준이 필요합니다.
시뮬레이션 및 희귀 시나리오 재현의 어려움
비, 안개, 눈과 같은 혹독한 날씨 조건은 신호 감쇠를 유발하며, 이는 실제와 유사하게 모델링하기가 매우 어렵습니다. 따라서 효과적인 전략은 물리 기반 시뮬레이션과 통제된 실외 테스트를 결합하는 것입니다.
또한, 눈부신 빛, 거울/금속 반사, 반사 표지판 등 “나쁜” 광학 조건은 실험실에서 재현하기 어렵습니다. 합리적인 접근 방식은 표준화된 시나리오, 합성 코너 케이스(Corner Case)를 조합하고 실제 도로에서 검증하는 것입니다.
마지막으로, 빠르게 움직이는 작은 객체와 희귀한 행동(갑자기 끼어드는 보행자, 급가속하는 자전거)은 모든 경우를 포괄하기 어렵습니다. 따라서 각 팀은 리스크 기반 테스트를 적용하고, 시뮬레이션을 통해 시나리오 변형을 생성한 후 선별적으로 검증하여 비용 대비 커버리지를 균형 있게 맞추어야 합니다.
이러한 난관을 해결하기 위해 기업은 회귀 테스트(Regression Test), 시나리오 리플레이, 포인트 클라우드 데이터 라벨링 및 분류, KPI 보고서 작성과 같은 반복적인 작업을 최적의 비용을 가진 국가로 아웃소싱할 수 있습니다.
동시에 HIL/SIL, 시뮬레이션 및 시나리오 관리를 표준화하기 위해 표준을 충족하는 ‘자동차 소프트웨어 테스트 센터’를 구축하거나 임대할 수 있습니다. 반복적인 작업을 전문 공급업체에 위임함으로써 사내 개발팀은 알고리즘 R&D, 센서 퓨전 최적화 및 SOTIF에 집중하여 인증/출시 기간을 단축하고 작업 부하를 줄이며, 품질을 유지하면서 총 소유 비용(TCO)을 절감할 수 있습니다.
자동차 라이다 테스트 실제 사례 연구
중국 고객사를 위한 라이다 테스트
고객사 소개
고객사는 중국 Shenzhen에 위치한 LSLIDAR(LeiShen Intelligence)는 선도적인 라이다 및 완전한 솔루션 제공업체입니다. 2015년 2월 설립 이후, 강력한 독립 연구개발 역량을 바탕으로 꾸준히 성장해 왔습니다. 고급, 안정적이며 신뢰할 수 있는 라이다 환경을 구축하여 산업 업그레이드를 촉진하는 사명을 훨씬 앞서 나가고 있습니다.
과제
- 새로운 기술로 인해 테스트를 지원하기 위한 많은 하드웨어 설치가 필요함
- 테스트 팀에 장비 이전이 어려움
요구 사항
- 하드웨어 및 환경 설정
- 거리 및 GPS 데이터를 실시간으로 수집
- 도로에서 비정상적인 데이터가 있는지 보고서와 함께 확인
해결 방안
- 차량에 라이다를 설치한 후 여러 환경에서 테스트 진행
- 데이터 기록을 위한 PC 소프트웨어 설치
결과
- 데이터를 수집하고 데이터 기록에 문제점이 있는지 확인
- 좌표, 각도, 거리, 부피, 높이 프로파일 등 계산
라이다의 시장 규모 및 미래 트렌드

Precedence Research에 따르면 2024년 기준 전 세계 LiDAR 시장 규모는 약 23억 7천만 달러에 달하며 2025년 28억 9천만 달러에서 2034년까지 약 158억 3천만 달러로 성장할 것으로 예상되며 2025년부터 2034년까지 연평균 성장률(CAGR)은 20.91%에 이를 것으로 전망됩니다.
아시아 태평양 지역은 가장 빠른 성장세를 보일 것으로 예측됩니다. 이 지역은 급속한 도시화와 인프라 개발이 특징이며 LiDAR 기술은 도시 계획, 스마트시티 구축, 효율적인 인프라 설계에 필수적입니다. 또한 이 지역의 다양한 지형과 생태계는 산림 관리, 환경 모니터링, 지질 조사 등 자연 자원 관리 측면에서도 LiDAR의 활용 가치를 높이고 있습니다.
LiDAR 시장 성장 요인
- 자율주행차 및 모빌리티 솔루션: 자율주행 기술은 실시간 매핑과 물체 감지를 위한 핵심 기술로 LiDAR에 의존합니다. 자율주행 교통에 대한 관심과 투자 확대는 LiDAR 시장의 성장을 가속화하고 있습니다.
- 스마트시티 및 도시 계획: 기술이 통합된 도시 생활 개선을 목표로 하는 스마트시티 트렌드는 도시 모델링, 인프라 계획, 교통 관리와 같은 분야에서 LiDAR 수요를 증가시키고 있습니다.
- LiDAR 기술의 발전: 센서가 더 작고 가벼우며 비용 효율적으로 발전함에 따라 다양한 산업에서의 접근성이 향상되어 LiDAR 시장 확장에 기여하고 있습니다.
Grandview Research에 따르면 2023년 전 세계 자동차 LiDAR 시장 규모는 약 5억 420만 달러로 평가되었으며, 2024년부터 2030년까지 연평균 성장률(CAGR) 9.4%로 성장할 것으로 예상됩니다.
자동차 산업은 고도화된 자율주행 수준으로 빠르게 전환되고 있으며, LiDAR 기술은 이 진화의 핵심 요소로 자리잡고 있습니다. LiDAR는 적응형 크루즈 컨트롤(ACC) 및 자동 긴급 제동(AEB) 시스템과 통합되어 자율주행 레벨 3 및 4 단계 차량에 필수적인 기능을 제공합니다. LiDAR는 정밀한 3D 환경 맵을 생성하여 복잡한 주행 상황에서도 차량이 정확한 판단을 내릴 수 있도록 지원합니다.
자동차 제조사들이 더욱 진보된 자율주행차를 개발함에 따라 이러한 안전 시스템에서 LiDAR 기술에 대한 수요도 빠르게 증가하고 있습니다. 이 같은 추세는 고성능 ACC 및 AEB 시스템의 개발을 촉진하고 있으며, 이는 현재뿐만 아니라 미래의 자율주행 요구사항까지 충족시키는 방향으로 발전하고 있습니다. 결과적으로, 자동차 LiDAR 시장의 성장을 가속화하는 중요한 원동력이 되고 있습니다.
자동차 라이다 테스트 관련 자주 묻는 질문
자동차 라이다 테스트(Automotive LiDAR Testing)는 무엇인가요?
자동차 라이다 테스트는 차량/ADAS에 사용되는 LiDAR 센서의 검증 및 확인(Validation & Verification) 과정을 의미합니다. 이 과정에서는 탐지 범위, 거리/각도 정확도, 환경 내구성, 지연 시간(Latency), 오탐율(False Positive Rate) 등의 핵심 성능 지표(KPI)를 측정합니다. 테스트는 일반적으로 실내 벤치 테스트, SIL(Software-in-the-Loop)/HIL(Hardware-in-the-Loop) 시뮬레이션, 그리고 실제 도로 주행 테스트 등 여러 단계에 걸쳐 시스템 전반을 검증하는 방식으로 진행됩니다.
자동차 라이다 테스트와 관련하여 기업이 겪는 주요 비즈니스 과제는 무엇인가요?
가장 큰 과제는 비용과 복잡성입니다. 기후 환경 챔버, 야간 테스트 트랙, VRU(취약 도로 이용자) 시뮬레이션 목표물, 정렬 장비, 그리고 방대한 포인트 클라우드 데이터 인프라 구축 등 막대한 비용이 소요됩니다. 둘째, 전 세계적인 표준화 부족도 큰 문제입니다. 각 시장이 다른 표준/프레임워크를 적용하고 있어 인증 및 비교에 어려움이 있습니다. 마지막으로, 희귀 시나리오(폭우, 안개, 눈부심, 빠르게 움직이는 작은 객체 등)를 상용화 전에 완벽하게 시뮬레이션하고 재현하는 것이 매우 어렵습니다.
자동차 소프트웨어 테스트는 자동차 산업 기업에 좋은 선택인가요?
올바르게 계획된다면 좋은 선택이 될 수 있습니다. 기업은 자동차 라이다 테스트의 반복적인 작업(회귀 테스트, 포인트 클라우드 라벨링, 시나리오 리플레이, KPI 보고 자동화 등)을 전문 공급업체나 비용 효율적인 국가에 위치한 자동차 소프트웨어 테스트 센터에 아웃소싱할 수 있습니다.
이를 통해 사내 팀의 부담을 줄여 R&D에 집중하게 하고, 전반적인 시장 출시 시간을 단축하며, 총비용(Total Cost)을 절감하는 데 도움이 됩니다. 단, SLA(서비스 수준 협약), 데이터/IP 보안, 그리고 엔드투엔드(End-to-End) 프로세스 및 툴체인 통합에 대한 철저한 관리가 전제되어야 합니다.
마무리
본 글에서는 자동차 라이다 테스트란, 자동차 LiDAR의 이점, LiDAR 테스트의 비즈니스 과제, LTS Group 실제 사례 연구를 차례로 명확히 다루었습니다.
LTS Group은 자동차 소프트웨어 테스트의 포괄적인 서비스를 제공하며 비용 효율적인 국가에 테스트 센터를 구축하거나 임대하여 운영할 수 있습니다. 또한 HIL/SIL 프로세스, 테스트 자동화 및 시나리오 기반 테스트를 표준화합니다.
저희 전담 팀은 명확한 SLA(Service Level Agreement)에 따라 반복적인 작업(회귀 테스트, 시나리오 리플레이, 포인트 클라우드 라벨링 및 분류, KPI 보고서 작성)을 수행하며 기존 툴체인(Toolchain)에 원활하게 통합되고 ISO 26262/SOTIF 및 NCAP 요구사항을 준수합니다.
반복 업무를 아웃소싱함으로써 사내 팀은 알고리즘 R&D, 센서 퓨전 및 차별화된 기능에 집중할 수 있으며, 이로 인해 총 소유 비용(TCO)과 시장 출시 시간(Time-to-Market)을 크게 최적화할 수 있습니다.
지금 바로 LTS Group에 문의하시어 자동차 라이다 테스트를 표준화하고, 인증 속도를 높이며, 최적의 비용으로 제품을 더 빠르게 시장에 출시하세요!
Share


강민서
"한국 시장의 IT 분야에 대한 콘텐츠 제작자인 민서를 만납시다 그분은 정보기술 분야에 깊게 관심을 갖고 특히 신규 기술 분야에서 한국과 베트남 협력관계 및 IT 솔루션에 대한 정보를 독자들에게 신속하게 전할 수 있습니다. 유익한 IT 지식으로 독자와 함께 친한 친구가 되고 재미있는 기술여정 완전히 즐길 수 있음을 믿습니다. minseo.kang@ltsgroup.tech 이메일로 연락하세요. "

기타 성공한 사례연구

이메일:contact@ltsgroup.tech
전화:(+84) 96-238-7474
본사:베트남, 하노이, 68 Nguyen Co Thach 길, MHDI빌딩 17층
일본 사무소:일본, 108-0023 도쿄도, 미나토구, 시바우라 3-20-10, 이와모토빌딩 5층
미국 사무소:25787 Rawley Springs Dr, Chantilly, VA 20152
한국 사무실:서울특별시 서초구 강남대로 327 대륭서초타워 12층 1214호




